RSS 2023 Recap
Last week, I attended Robotics: Science and Systems in Daegu, South Korea. While there, I presented our paper, Non-Euclidean Motion Planning with Graphs of Geodesically-Convex Sets. This was my first experience presenting at a single-track conference, and giving a talk in front of hundreds of people was pretty anxiety-inducing! But I think the talk and poster session went very well. You can view the poster here, and I've clipped a recording of the talk from the RSS livestream here.

There were several papers at the conference that I found particularly interesting. Path Planning for Multiple Tethered Robots Using Topological Braids presents a group-theoretic framework for tethered quadrotors, which may be in a knotted configuration. It would have been very nice to know about their work when I was working on my final project with Seiji Shaw for Underactuated this past spring. In that project, we ended up making the simplifying (and somewhat unrealistic) assumption that the cables would not tangle.
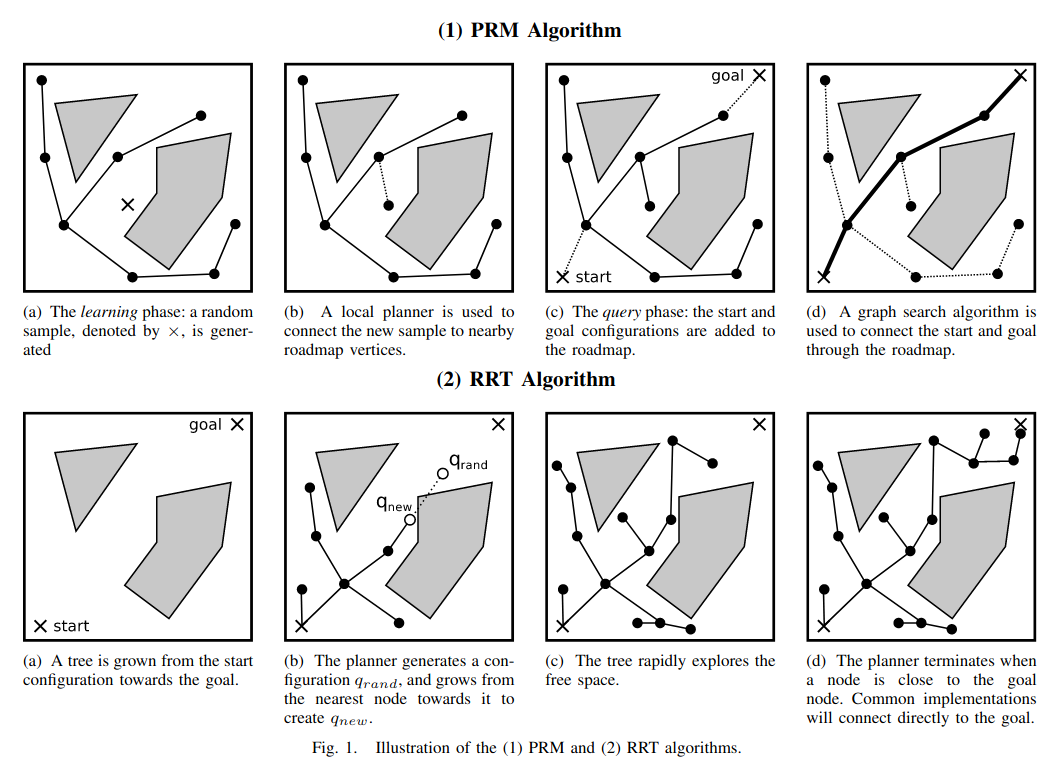
Another paper that stood out to me was Motion Planning (In)feasibility Detection using a Prior Roadmap via Path and Cut Search. This paper discussed roadmap-based planning, where it's unknown at planning-time whether or not an edge is valid. They either present an optimal path from the start to the goal (with respect to all paths in the graphs), or a certificate of infeasibility, in the form of a graph cut that separates the start and the goal.
As an overall trend, there were many papers utilizing diffusion policies, and I got the chance to discuss one of these papers with its authors. Among other things, they emphasized that their use of a continuous-time formulation for diffusion was significantly better than discrete-time approximations. I'm far from an expert on diffusion policies, but I feel it's worthwhile to pass that advice on. (The code from that paper can be found here.)
Finally, I got the chance to discuss G*: A New Approach to Bounding Curvature Constrained Shortest Paths through Dubins Gates with one of its authors. This type of graph problem with neighborhoods feels spiritually similar to GCS, and we had a lot to talk about. Perhaps a convex decomposition could yield "gates" that yield a tighter bound on the optimal path length? Maybe there's a way to plan Dubins paths through such gates? It's definitely something both of us will be thinking about.
Now, I'm back in Cambridge (although my circadian rhythm still thinks it's in Daegu). The research direction we presented on at RSS is continuing, so maybe I'll be able to post a preview sometime soon.
Comments
Post a Comment