Differing Formulations of GCS for Motion Planning
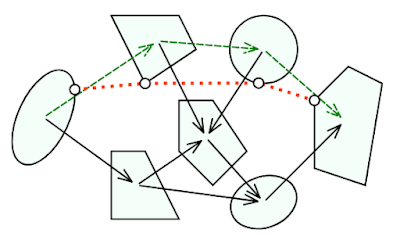
In case you haven't heard of it before, GCS stands for "Graph of Convex Sets", and it is a framework for certain mixed integer convex optimization problems, primarily used for robot motion planning. I previously wrote a blog post on my experience implementing a basic version of it, which you can find here . I'd recommend reading that blog post before looking at this one. If you've read that previous blog post, you may recall that I described two different ways of transcribing the motion planning problem into a graph of convex sets. I implemented one version, which seems more faithful to the original GCS paper . However, the other transcription, presented in the planning-specific followup paper , has several benefits over the previous approach. In this blog post, I'll briefly present both methodologies, and explain their costs and benefits. Formulation 1: Conjugate Graph Fig. 1 of Shortest Paths in Graphs of Convex Sets The classic picture of GCS is the one sho...